Posted by @hansdmc:
HI, i having issue in developing open-RMF.
Operating system and version:
Ubuntu 20.04
OpenRMF installation type:
From source => vcs import < RMF.repos
from the rmf.repos i modify:
rmf-simulation => foxy
thirdparty/pybind11_json_vendor => prep-0.1.0
to work in ros-foxy.
RMF-web taken from:https://github.com/open-rmf/rmf-web.git
using python 3.10 venv
ROS distribution and version:
ROS-FOXY
ROS installation type:
From source: https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html
the simple trial setup i connect my robot controller similiar to tinyrobot and creating a custom map through traffic editor
<arg name="use_sim_time" default="true"/>
<include` file="$(find-pkg-share rmf_demos)/common.launch.xml">
<arg name="use_sim_time" value="$(var use_sim_time)"/>
<!-- <arg name="viz_config_file" value ="$(find-pkg-share rmf_demos)/include/testmap/office.rviz"/> -->
<arg name="config_file" value="$(find-pkg-share rmf_demos_maps)/testmap/testmap.building.yaml"/>
<arg name="dashboard_config_file" value="$(find-pkg-share rmf_demos_dashboard_resources)/testmap/dashboard_config.json"/>
</include>
<group>
<include file="$(find-pkg-share rmf_demos_fleet_adapter)/launch/fleet_adapter.launch.xml">
<arg name="use_sim_time" value="$(var use_sim_time)"/>
<arg name="nav_graph_file" value="$(find-pkg-share rmf_demos_maps)/maps/testmap/nav_graphs/1.yaml" />
<arg name="config_file" value="$(find-pkg-share rmf_demos)/config/testmap/config.yaml"/>
</include>
</group>
the command send through rmf-demos-task with ros2 run manage to pass through and received by the robot.
however i encountered issue that i would like some clarification:
-
for some reason if the task is not completed the task would not disappear or erased even with rebuilding the src or restarting the computer.
-
Is Lidar MAP necessary for traffic-editor?
-
i cannot get the RVIZ to work is there a building system to build RVIZ from the traffic editor. *hence it is currently commented out
-
i cannot get the RMF-web to connect to the open-RMF using ros2 launch …launch.xml server_uri:=“http://localhost:8000/_internal”
=> according to GitHub - open-rmf/rmf-web to put the server_uri to http://localhost:8000/_internal
i received this error message
[testmap_fleet_adapter]: BroadcastClient unable to connect to [http://localhost:8000/_internal]. Please make sure server is running. Error msg: invalid statethrough pacakage/dashboard pnpm start i can access rmf-dashboard through localhost:3000
is there a step that i missed or should’ve be done?
let me know if further clarification or information are required. thank you
Chosen answer
Answer chosen by @hansdmc at 2023-10-13T02:47:32Z.
Answered by @aaronchongth:
the command persist when the fleet manager launches. i have tried to clear the src rm -rf build/ install/ logs/ or changing the domain id or restarting the computer. when the system restarted the robot would directly move involuntarily without additional command.
this is a rather peculiar issue that we have not encountered before. Is it possible for you to share your map file and launch files? There may be a low chance that a ROS 2 process has not died properly, but that should be mitigated by a full restart. Can I check that no other machines in your network are running the same processes and are on the same ROS 2 domain id?
Sorry, let me clarify, how do i mesh the map i used in traffic editor with the nav-graph route such like the rmf- visualisation example taken from: GitHub - open-rmf/rmf_visualization: Visualization tools for OpenRMF
currently rviz only display a blank screen with negotiation table. pretty much similar as to running ros2 launch rmf_visualization visualization.launch.xml as a standalone.
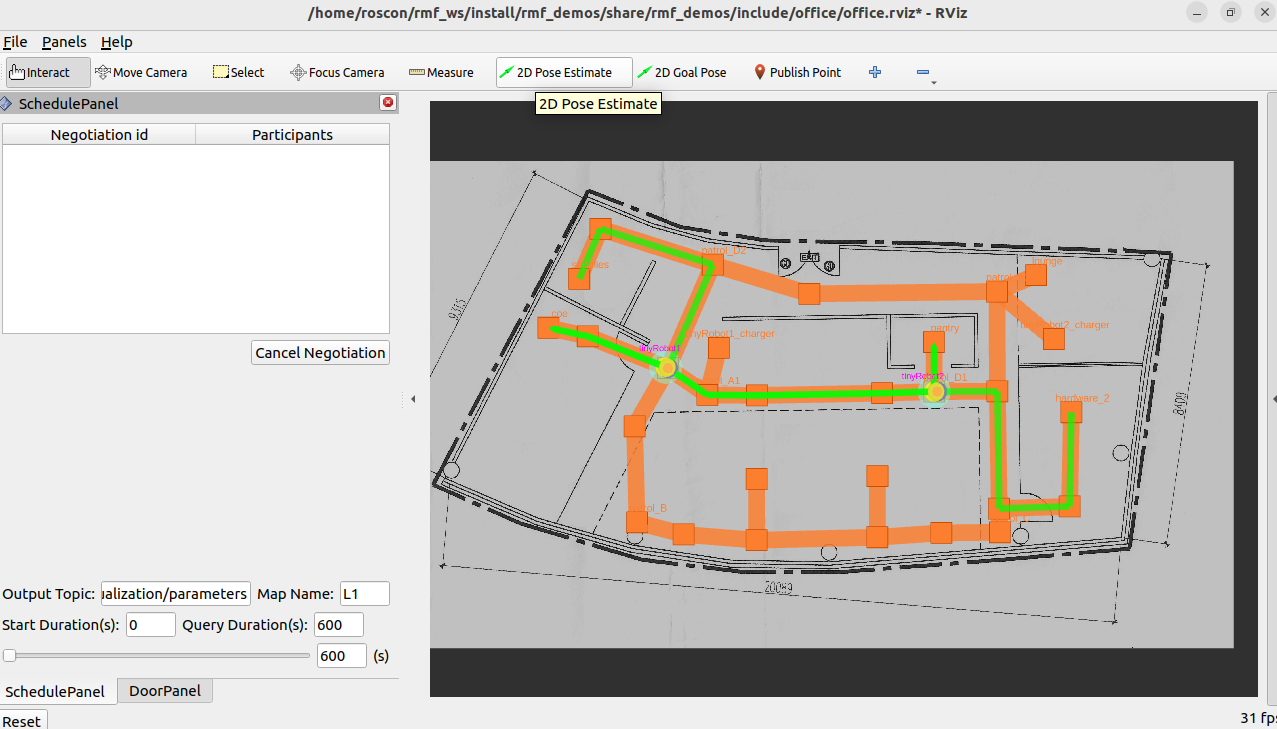
The building map will need to be served by the building map server like this, rmf_demos/rmf_demos/launch/common.launch.xml at main · open-rmf/rmf_demos · GitHub, in a demo.
Don’t forget to change the map/level name in rviz’s schedule panel.
is there a configuration i should have done to set up and connect the RMF-WEB to the Open-RMF
The API server handles the port 8000, while the dashboard is by default hosted on 3000, setting the server_uri to http://localhost:3000/_internal is incorrect.
Does the map show up on the dashboard like GitHub - open-rmf/rmf-web?
also how do i check which open-rmf version i am currently working on?
on which branch of GitHub - open-rmf/rmf: Root repository for the RMF software did you get your rmf.repos file? If that is main, I’m afraid there is limited number of things we can advise on, as we are fully developing and working in ROS 2 Humble and Iron.
i suspect the same issue would appear even if i migrate it to ros-humble
This may be true, if there are some misconfigurations to set up Open-RMF on your end, however since active development is currently on Humble and Iron (ROS 2 Humble and Iron has a lot of improvements over Foxy too!), we can better help understand what the potential issues are if we are on a similar setup.
You mentioned that the issue was present in GitHub - open-rmf/roscon_workshop: Materials for Open-RMF workshop at ROSCon 2022 Kyoto as well? Do you mean the default world in the workshop, or the modifications that you’ve made were not working?
Moving forward, I would suggest trying the demos, without any modifications, on a separate machine running Ubuntu 22.04 and ROS 2 Humble, to get an idea of how all the nodes should interact with each other, and how the outcome should look like, before replacing the map, as well as the fleet adapter to see which components may have issues.