Hi, ROS and Kubernetes users
I would like to share a couple of updates for tutorial how to deploy ROS 2 with Kubernetes including answering the question at ROSCon 2023.
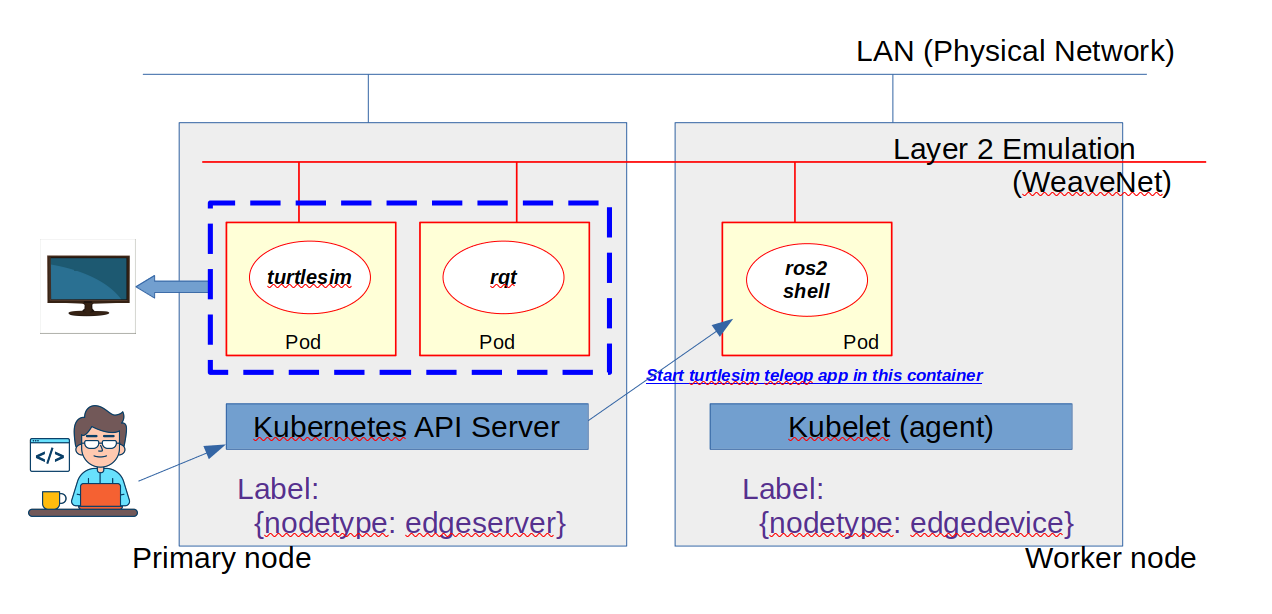
ROS 2 GUI Display Access
see deployment description ROS 2 turtlesim and rqt
ROS provides many useful tools via GUI such as rqt, rviz and GUI application like turtlesim. This example deploys ROS 2 turtlesim application container bound to the node which has display, and access the xserver from the container, application container can display the turtlesim on the display. At the same time, it will bring up rqt to monitor the topic on the same node which has display. To control the capability such as which node has display , it will use node labels to describe the capability and at the deployment we can select this label as application container requirements.
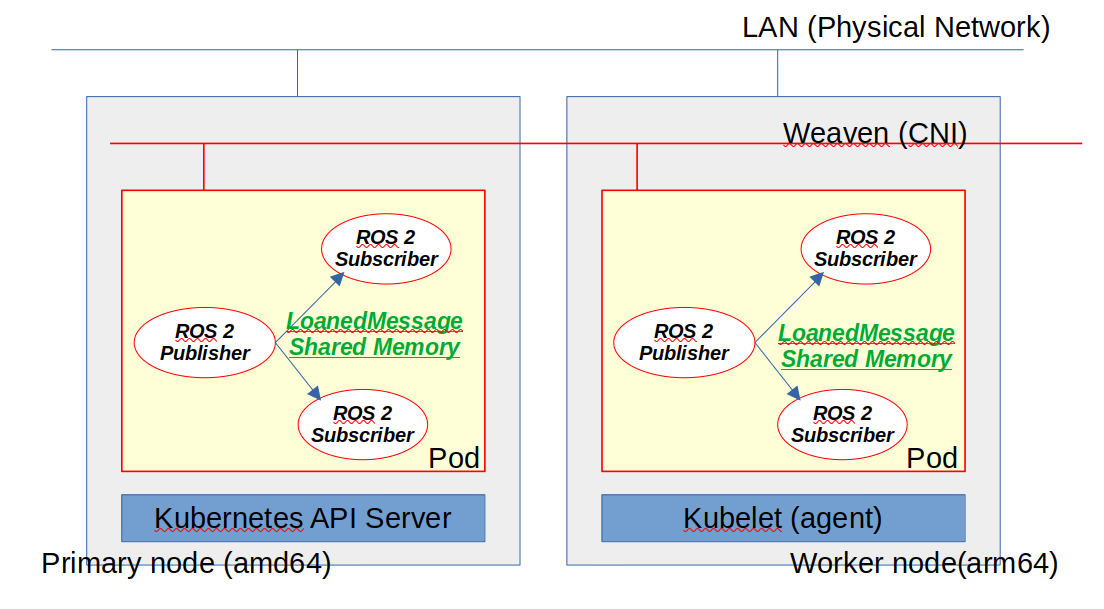
ROS 2 Zero Copy Data Sharing
This was originally questioned during ROSCon 2023 Talk ROS with Kubernetes / KubeEdge, now we have practical procedure how to use those feature with Kubernetes.
see deployment description ROS 2 Zero Copy Data Sharing
Fast-DDS can achieve zero copy feature without any daemon process running, that makes it easier to use this feature in the container.
If you are interested, please subscribe GitHub - fujitatomoya/ros_k8s: Kuberenetes / ROS&ROS2 Cluster Samples ![]()
thanks,
Tomoya