Delievery Arcade Project - Part 2
This article is sponsered by ROBOTIS

Hi guys  It’s Guerilla-Coders again.
It’s Guerilla-Coders again.
Following the last article, this is a posting about how we had a meeting with ROBOTIS and carried out the Delivery Arcade project.
First of all, I think we need to briefly explain the structural framework of Delivery Arcade.
It largely consists of following four components.

Agent
- Records external environment with onboard camera
- Recognizes its surroundings with LIDAR
- Transmit collected data to the server
- Receive external control signals relayed from the server
Server
- Connects the app with the agents
- Preprocess the received data from agents before sending them to the App.
- Interprets 3D data of surrounding terrain read by LIDAR
- Sends the processed video to the App.
- Relays the control signal received from the app to the agent
App
- Displays the video received from the server on the screen
- Provides a controller that allows users to control agents
- Provides a UI that allows users to match free agents and receive rewards
Goggles (AR Glass)
- Show reconstructed 3D imaged to the user tethered through cable or wirelessly
Each element exchanges data from the external environment felt by the robot and information on the user’s movement command, as shown in the schema above. The basic purpose of the Delivery Arcade project is to complete all four elements and tie them together to communicate well as one system.
The biggest challenge of this project was actually how to implement AR glass and delivery robots. In fact, we decided to use RAONTECH’s product for AR glasses, but it actually took a lot of challenges to build a driving robot. At this time, ROBOTIS’ Turtlebot 3 reduced a large part of the burden during production process. Being completely open-source hardware-wise and software-wise, it was a perfect product for prototyping our project. Every hardware components were documented well in provided CAD model and ROS based software was easy to learn.
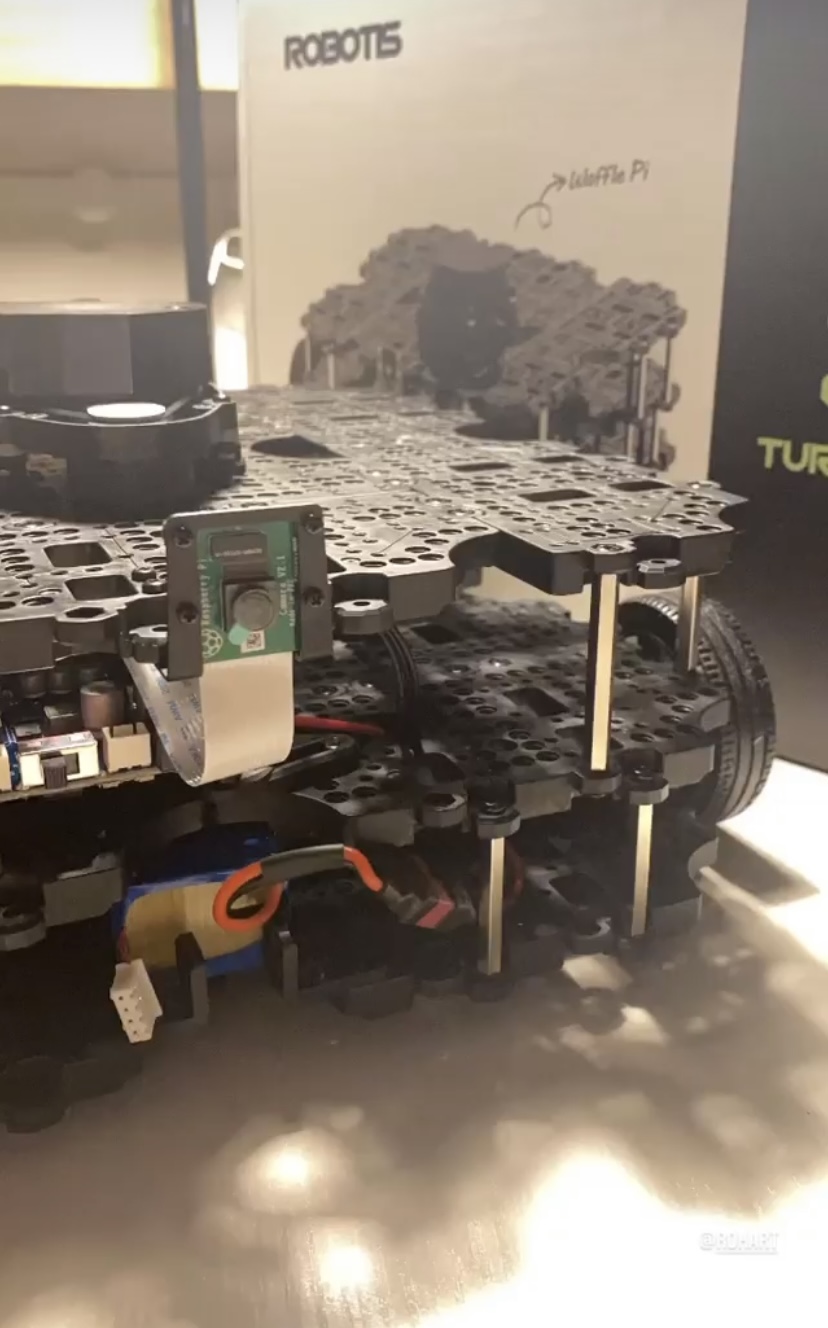
We had a preliminary meeting with ROBOTIS, conducted various coordination, and thankfully they decided to sponsor us with Turtlebot 3. In fact, we visited the ROBOTIS headquarters at Magoknaru Station and received Turtlebot 3 robots. The model we used is Waffle-Pi considering the design and purpose of the robot.
Thank you ROBOTIS for willingly supporting robots for the project!
The next post is about the development process.
p.s. following is our github address