Hey guys, we’re Elephant Robotics. ![]()
We would like to thank all the developers and maintainers of ROS for providing us with a lot of help in developing the robotic arm, and we appreciate you! ![]() Now we have a bunch of robots with built-in ROS. Here is one.
Now we have a bunch of robots with built-in ROS. Here is one.

myCobot 280 is the world’s smallest 6-DOF robotic arm powered by ROS. myCobot not only enjoys numerous software interaction methods and expansion interfaces but also has access to different end effectors for various applications.
With a built-in ROS language
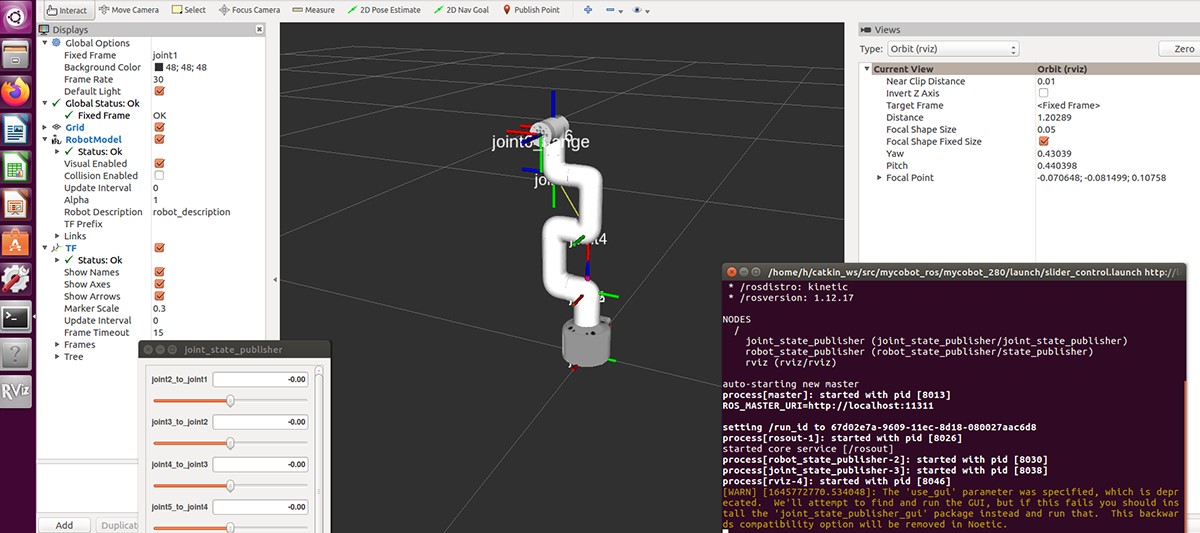
Here are some ROS features and packages that we use:
- URDF
- RVIZ
- Moveit
- OpenCV
So, we use all the ROS Industrial stack on this robot.

We put the open-source code of myCobot on GitHub,
you can use it for reference or give us your opinion.
There are currently four versions of our myCobot 280 product line,
which are M5stack, Raspberry Pi, Jetson Nano, and Arduino.
They each show their characteristics and we have also made relevant evaluations.

(BTW, we are also migrating ROS1 to ROS2.)
If you are interested in myCobot (for ROS development projects, or robot learning), follow us for further info, and we will constantly update the development of robotic arms.
We’re excited to share our project here, and hope you’ll feel free to chat with us about ROS and give us some advice.
Related Information:
Home | Elephant robotics
GitHub | Elephant robotics
YouTube | Elephant robotics