VantTec is a group of students of Tec de Monterrey in Mexico that focuses on research and development of autonomous vehicles. The team was founded in 2017 to participate in the RoboBoat competition. Three years later, they won all the categories of the RoboBoat 2020 edition. The team is composed of undergraduate students, ranging from freshmen to seniors, and recently graduated members.
RoboBoat is an international competition hosted by RoboNation, where every team has the goal of designing, building, and programming an Unmanned Surface Vehicle (USV) to navigate through a set of aquatic challenges. Advanced areas of robotics are applied, such as guidance, navigation, and control systems. These boats are also designed to mimic real-world challenges faced by the maritime industry such as coastal surveillance, port security, and other types of oceanographic operations. Challenges such as navigating through fields of buoys, obstacle channels, and autonomously docking are part of the competition. Due to the pandemic, the RoboBoat 2020 edition was held online, this post includes the work done by VantTec to win the competition.
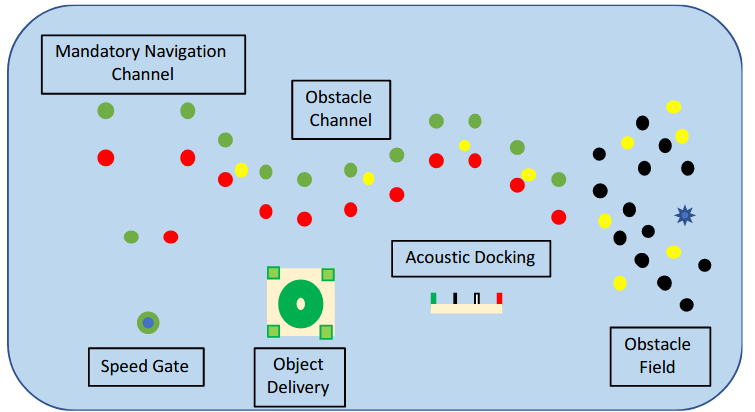
RoboBoat 2020 competition course.
VTec S-III is the USV model used since the RoboBoat 2018 edition. It is equipped with two Blue Robotics T200 thrusters as its propulsion system, a Jetson TX2 as the main processor unit, and a VectorNav VN-300 INS for state-estimation. The perception system includes a ZED camera used for detection of obstacles that the system knows the USV is going to encounter by training a CNN, and the use of the VLP-16 LiDAR for detecting unexpected obstacles. Both the LiDAR and ZED camera point clouds are intended to improve obstacle pose estimation. For sound signal detection, a hydrophone array is implemented. Finally, for communications with the ground station, a Digi Xtend RF Module is used.

VTec S-III USV platform.

VTec S-III technical specifications.
Since 2019, Robot Operating System (ROS) has been the backbone of the software architecture. This year, the whole system was redefined and it now integrates different ROS custom packages.
USV_COMMS package enables communications between the boat and the ground stations through radio-frequency modules. This allowed the ground station to command the USV when to start or kill the system and also receive feedback from the USV.
USV_MASTER controls the course planning and execution. This package runs on the boat and it receives directives from the ground station through USV_COMMS to control the execution of different challenges from the RB_MISSIONS package. This package includes the RoboBoat 2020 edition challenges: Mandatory Navigation Challenge, Speed Gate, Obstacle Field, Obstacle Channel, and Acoustic Docking.
USV_CONTROL is the package where an Adaptive Sliding Mode Control (ASMC) for the desired surge speed and heading is implemented and uses a Line-of-Sight (LOS) guidance law for path-following control.
ARDUINO_BR uses rosserial to interface with the T-200 thrusters. It receives the desired motor PWM signal through USV_CONTROL and sends the signal to the two motor Electronic Speed Controller (ESC).
Three sensor ROS wrappers are included in the system. The VECTORNAV package is used to interface the USV with the VectorNav IMU sensors. The VELODYNE package for the Velodyne LiDARs and the ZED package for the Stereolabs ZED camera.
The USV_CONTROL and USV_PERCEPTION packages handle the real-world interaction of the USV. The USV_PERCEPTION package uses data from the VELODYNE and ZED packages to detect and map obstacles. This data then goes as input to the visual-based guidance systems from RB_MISSIONS. The USV_CONTROL uses the speed and positional data from the VECTORNAV package as feedback. The USV_CONTROL package additionally receives data from USV_PERCEPTION for the collision avoidance methodology.

ROS architecture of the VTec S-III.
The simulation environment consists of the USV dynamic model programmed implementation, the URDF file of the boat, and obstacles represented as RVIZ markers whose positions and color are published through a ROS topic as a simulation of the sensor’s output. The results are shown below.

Mandatory Navigation Channel.

Speed Gate.

Obstacle Channel.

Acoustic Docking.

Obstacle Field.
Additional resources: