Upcoming ROS Developers Open Class:
Episode 4: Connect to the real Nanosaur robot

- Live Class link (No registration required. You only need a The Construct account): https://app.theconstructsim.com/#/LiveClass/8953502c-39c2-414f-9685-db54cac211bb
- Free event. Open to everyone
- LIVE on: 2021-11-23T17:00:00Z
Nanosaur is the smallest NVIDIA Jetson dinosaur robot, designed and made by Raffaello Bonghi.
Nanosaur is a simple open-source robot based on NVIDIA Jetson. The robot is fully 3D printable, can autonomously wander on your desk and uses a simple camera and two OLEDs — these act as a pair of eyes. It measures a compact 10x12x6cm and it weighs only 500g.
In this open class, we will connect to the real Nanosaur robot and we will control it using ROS2.
You will learn:
- How to connect to the real NanoSaur robot
- How to run and control the real NanoSaur robot with ROS2
Robot used: nanosaur, designed and made by Raffaello Bonghi
Instructor : Alberto Ezquerro
Previous class
Episode 3: Build Your Own Nanosaur
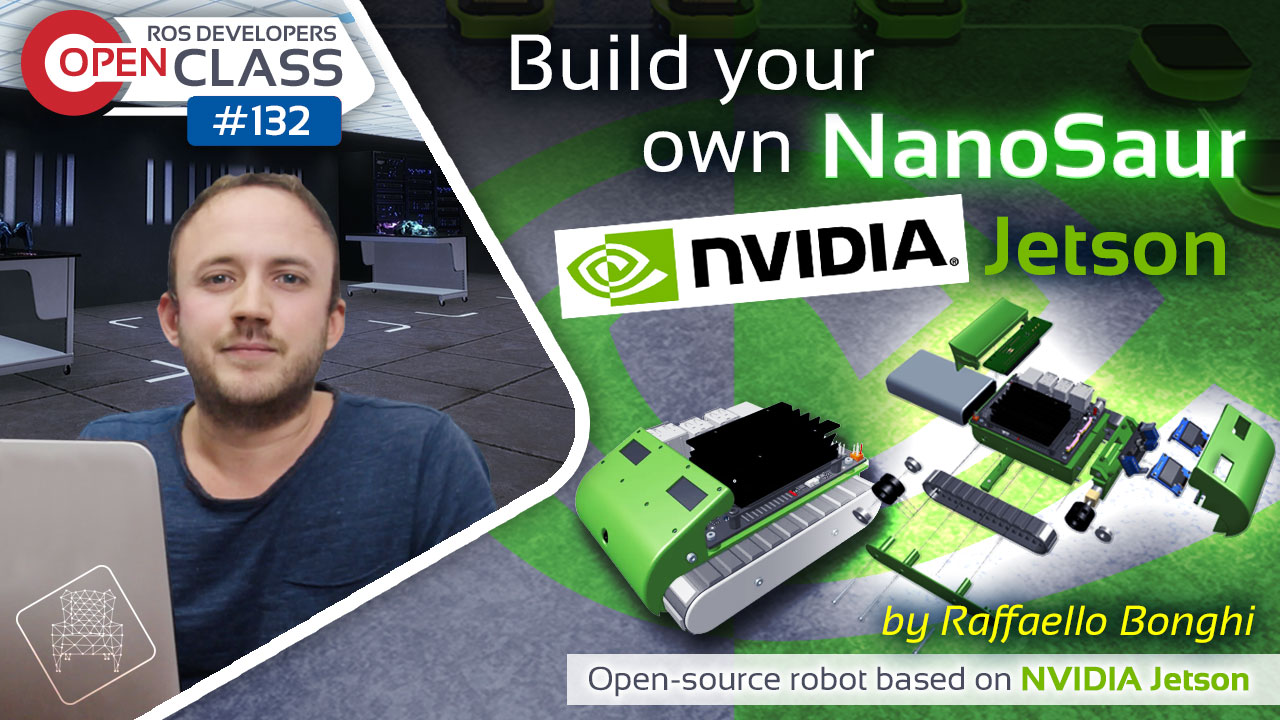
In this Open Class, we will assemble, step by step, the real physical NanoSaur robot. If you want to follow the process with us, you will need to previously have the required components ready. Check the previous Live Classes for more details.
Episode 2: ROS2 AI with Nanosaur
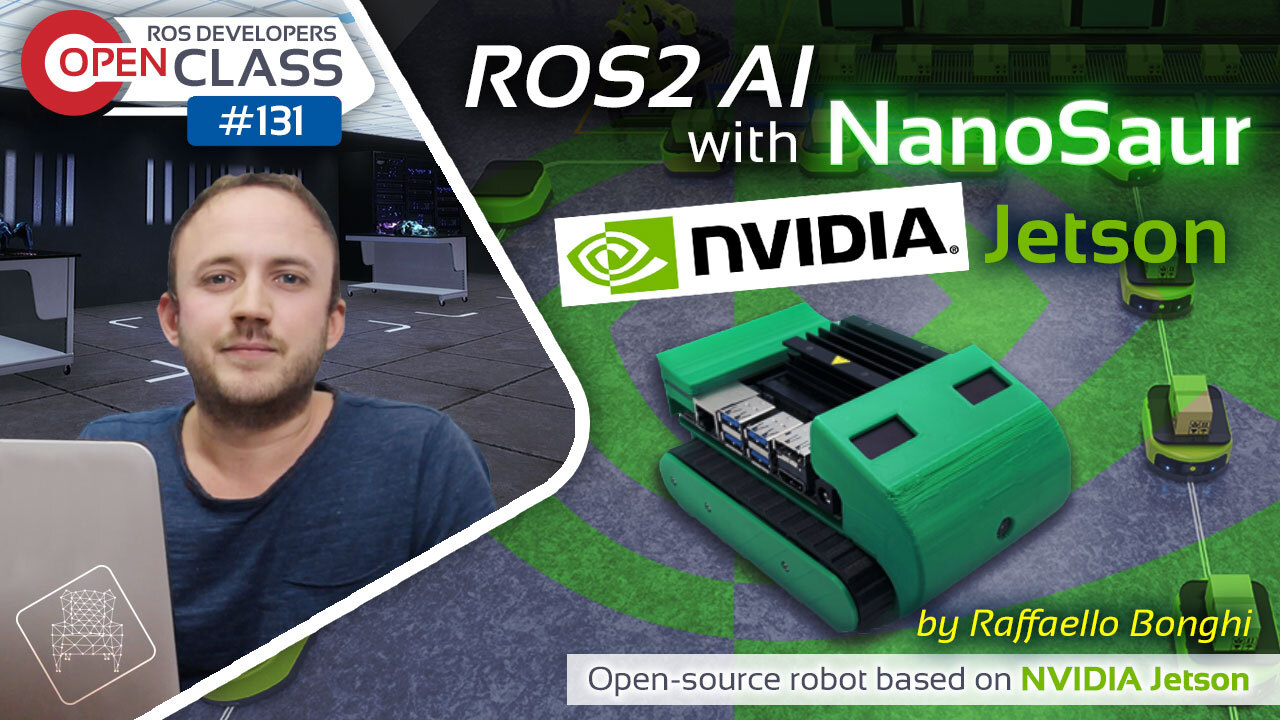
- Live Class link (No registration required. You only need a The Construct account): https://app.theconstructsim.com/#/LiveClass/fd0c12e9-2db5-4f69-a5bb-146b891bc69e
In this class, we will use the Nanosaur simulation to perform object detection with ROS2. We will show you how to apply YOLO with ROS2 to detect and position different objects and animals.
You will learn:
- How to use the YOLO object detection system in ROS2
- 2D Object Detection
- 3D Object Detection
Episode 1: Program Nanosaur with ROS2
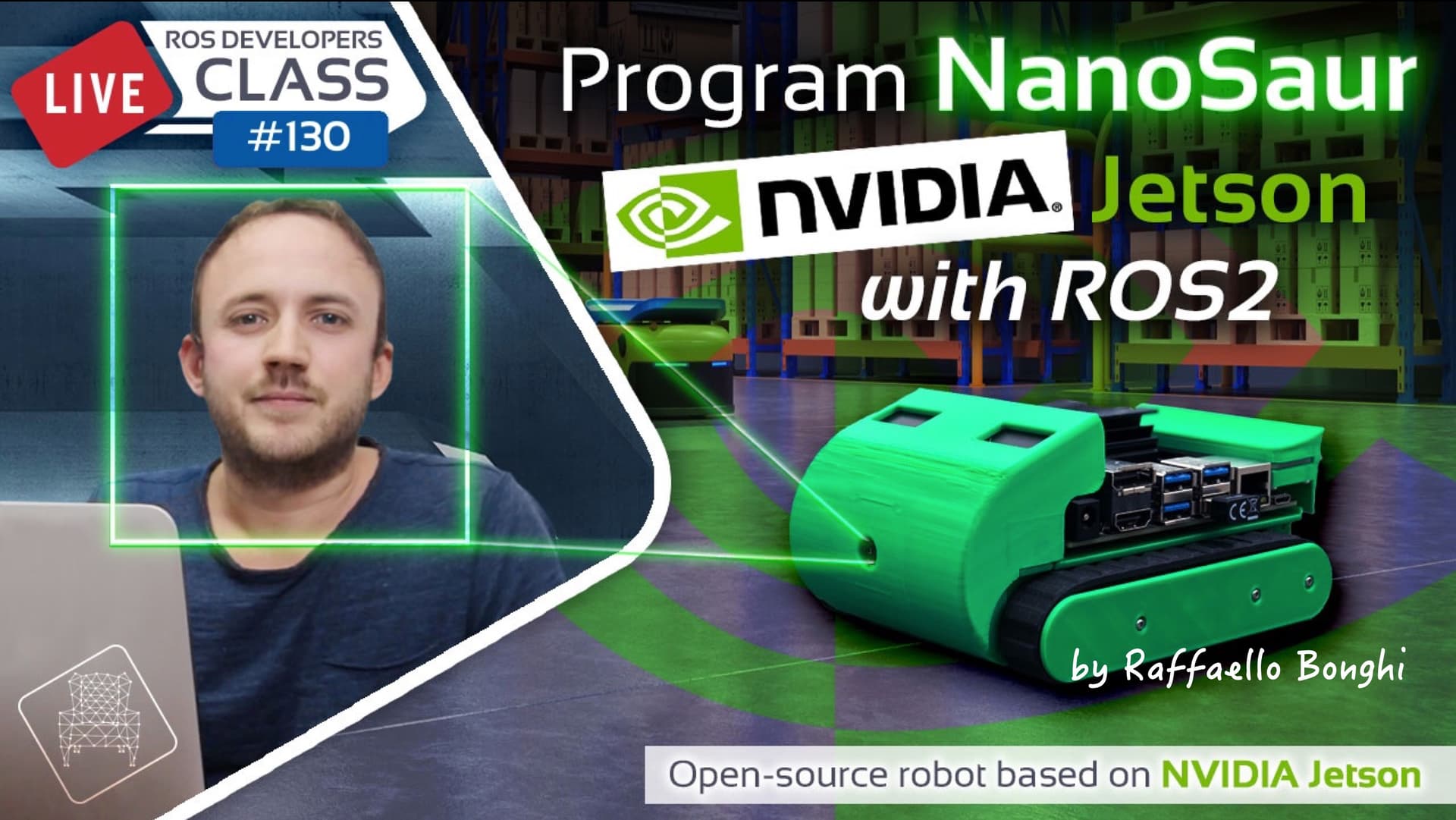
In this Live Class, we will use the nanosaur simulation to program with ROS2 Galactic.
You will learn:
- How to build a Gazebo simulation of the nanosaur robot.
- How to create a simple ROS2 program to control the nanosaur robot and move it around.
FULLY PRACTICAL. BEGINNERS WELCOME.